| 产品特性:软件算法 | 加工定制:是 |
一,BSD检测区域:
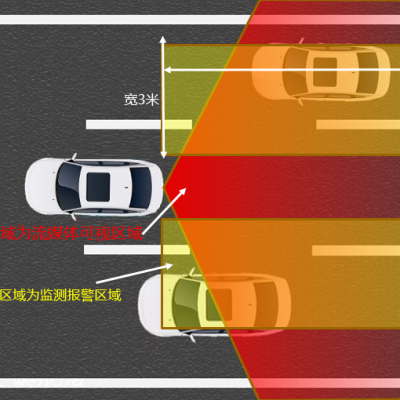
检测区域图。

注:1,后方检测区域为左右相邻车道车尾后为3*6m区域。
2,对于电动车保险杠前方的检测区域略短。
二,BSD功能:
1.BSD支持目标物:小轿车,吉普车,大客车,大货车,电动车,摩托车(不支持自行车)
2.报警条件:
①后方接近车辆报警:当后方有目标接近(相对速度小于30km/h)系统会在屏幕上点亮图标。
②车辆在检测区域内停留超过1s,也就是他车与自车保持相对静止或低速(相对速度小于5km/h)运动超过1s。系统会在屏幕上点亮图标。点亮图标如下图所示。
三,启动条件
自车车速自车车速>25km/h即启动(可根据需求修改阀值)
四,功能特点:
场景1:直行超车场景
自车正常前行,相邻车道后方有车辆大于自车车速靠近和超车经过自车时、且检测自车左右两侧相邻车道后方车辆前车轮进入6米监控区域内时,即启动BSD盲区监测报警;
场景2:转弯场景
车辆转弯时,监测区域内有低速行驶车辆或者电动车、摩托车等骑行行人时均会进行报警;
场景3:静止场景
当自车静止时,左右相邻车道有高速或低事行驶经过的汽车、摩托车、电动车等进入监测区域均会进行报警;
场景4:自车静止开门报警
当自车静止时,驾驶打开车门前,对经过左侧的车辆、电动车、摩托车会进行报警提示,避免因开车门发生碰撞风险。
五,其它扩展功能:
本公司具备除了流媒体后方BSD盲区功能以外,自车前行时,可利用后方摄像头扩展实现车道偏离预警(r-LDW)、后方防追尾碰撞预警(r-FCW)、后车车牌锁定(依赖于摄像头性能)、LCA并线辅助等;自车泊车时,可实现后向移动障碍物监测(MOD)、横穿障碍物监测(CTA)、车尾viewbird、车尾泊车多角度切换、可泊车车位识别等功能。